


Гинекологические операции с роботами
WHEC Практика бюллетень и клинической Управление Руководящие принципы для медицинских работников.
Образовательного гранта, предоставляемых Здоровье женщин и центр образования (WHEC).
Минимально инвазивные хирургические методы для выполнения матки и другие гинекологические операции были показаны по сокращению заболеваемости пациентов и сократить пребывание в больнице. Лапароскопия стала первопроходцем в погоне за совершенствование хирургических результатов по снижению послеоперационной боли и снижения времени восстановления. Однако, использование лапароскопических инструментов может быть громоздкими и неповоротливыми, увеличив таким образом оперативно время и сокращая ловкость, которые могут ограничить способность хирургу выполнять процедуру с теми же методами, что может быть достигнуто путем традиционного разрезания брюшной полости. Представленный в 1999 году, DaVinci хирургическая система, урологи-прежнему считаются числе системы одним пользователем, но роботы применения в гинекологической хирургии были расширяется. В 2005 году США по продовольствию и лекарствам было получено одобрение на использование робота DaVinci (Intuitive Surgical, Inc, Sunnyvale, CA) для использования в гинекологической хирургии, как модификация лапароскопической подход. Этот робот использует использование автоматических оружия, что контроль Изменения лапароскопических инструментов, которые имеют семь степеней свободы, давая хирургу значительно улучшить ловкость. Появление этой технологии сделало возможным проводить традиционные гинекологические процедуры, с помощью лапароскопической техники, что позволяет для удобства маневрирования, что сочетание преимуществ минимально инвазивные хирургические процедуры с более короткий период восстановления. Использование роботов в гинекологической хирургии растет в Соединенных Штатах. Десять лет спустя, все большее число учреждений здравоохранения покупаете роботом системы. В гинекологии расширения находит свое отражение в литературе доклады о роботе приложений в общем гинекологии, урогинекологии / тазовых реконструктивной хирургии, гинекологической онкологии, эндокринологии и репродуктивной.
Цель этого документа заключается в обзоре последних принятия, опыт и применение робота с помощью лапароскопии в гинекологической хирургии. Это, вероятно, продолжит развиваться как более гинекологических хирурги обучены и больше больных получают минимально инвазивных хирургических вариантов. Хорошо продуманные, перспективные исследования с четкими клиническими, долгосрочных результатов, в том числе осложнений, стоимость, более, вернуться к нормальной деятельности, и качество жизни, необходимо в полной мере оценить значение этой новой технологии. Хирургическое нововведением является необходимым. Есть этические и социальные вопросы, что-прежнему не понимает по поводу использования автоматических операций.
История и развитие роботов с помощью хирургии
Использование роботов в хирургии имеет произойти только в течение последних 25 лет. Первое применение робота хирургии была в нейрохирургии. Ограничения, связанные с обычными лапароскопии включают нелогичным движения рук, двумерной визуализации, а также ограниченная степень инструмент движения внутри тела, а также эргономичный трудностями и тремор усиления (1). В попытке преодолеть эти препятствия, робототехника недавно был включен в гинекологической арсенале. Оригинальная модель, известная как PUMA 560 (Stдubli корпорации, Duncan, SC), была использована для нейрохирургических маневрах под стереотаксическая компьютерной томографии (КТ) руководство. Вскоре, ортопедической хирургии было с помощью устройства, называемого ROBODOC (Curexo Technology Corporation, Сакраменто, Калифорния), которая облегчит Всего по замене тазобедренного сустава, урологии выполнял трансуретральной резекции простаты с роботом путем указания предоперационном построено трехмерное изображение. Общепринятая среди этих ранних роботы было то, что они были разработаны, чтобы функционировать в автономном режиме с предоперационной плана или надзорные функции. Эта пассивная роль будет развиваться в более активный, с полным погружением в среду, которая стала известна как робототехники TelePresence. Концепция технологии роботов TelePresence родилась благодаря совместным усилиям Стэнфордского исследовательского института Министерства обороны и Национального управления по аэронавтике и исследованию космического пространства (НАСА) (2). Исследование было направлено на военные позволяющий хирургам оперировать раненых с безопасным и удаленного местоположения. Поскольку технология дальнейшее развитие исследований, ориентированных не на Телехирургия но и на использование робота хирургии дальнейшего повышения лапароскопической и минимально инвазивной хирургии в гражданской операционных залов. Такое достижение стало возможным благодаря усовершенствованным системам видения, приборы с дистальной формулировании целей, и улучшенная эргономика (1) (2).
Хотя робот технологию TelePresence была первоначально создана для сердечной хирургии, но вскоре была применена к области урологии и гинекологии. Сегодня существует только одна продуктами и лекарствами США администрация утвердила устройства для хирургического робототехники. Нынешний робот платформа известна как DaVinci хирургическая система (Intuitive Surgical, Sunnyvale, CA). Ключевыми технологическими достижениями видели с ранее предшественников не только включен в платформу для сегодняшнего, но дальнейшее развитие. В 2000 году США по продовольствию и лекарствам одобрил использование роботизированной системой для лапароскопии, и специально для гистерэктомии в 2005 году. Robotic Surgery позволяет хирургу сидеть на консоли, а три или четыре робота двигаться руки над пациентом в соответствии с командами хирурга. Обычно проводится робота с помощью лапароскопической хирургии в гинекологии относятся доброкачественные гистерэктомия, миомэктомия, трубная reanastomosis, радикальная гистерэктомия, вскрытий лимфатический узел, а sacrocolpopexies.
Показания и противопоказания для роботов с помощью хирургии
Робота с помощью хирургии имеет аналогичные показаниям как обычные лапароскопической хирургии. Однако, поскольку робот технология позволяет хирургам более легко и просто выполнять сложные лапароскопические маневров, наличие робот позволит хирургу выполнять более сложные процедуры, чем обычные лапароскопические маршрутом, поэтому сокращение количества открытых процедур. Например, хирург может гинекологических обычно предпочитаю открытых процедур по сравнению с обычными лапароскопической маршрут для опытных тазового эндометриоза. Однако, с появлением роботов система, которая облегчает вскрытие ткани и наложение швов, хирург может избрать робота подход, что привело к сокращению заболеваемости, сокращение госпитализации, меньше послеоперационные боли, ранее вернуться на работу, и лучше косметические результаты по сравнению с открытые операции. Противопоказания, тоже, как правило, сходны с обычными лапароскопии (например, непосредственная потребность в лапаротомии для остановки кровотечения, плохая визуализация, или экспозиции). Робот системы обычно сокращает время оперативного длинной эндоскопические процедуры (например, радикальное удаление матки, лимфаденэктомия, sacrocolpopexy). С другой стороны, это может увеличить общее время краткий простой процедуре (например, аднексэктомия, эндоскопическая стерилизация). Когда вы добавляете на время, проведенное в драпировка и создание робота, стыковка время, и время работы комнаты оборот, использование роботов в системе проста краткий эндоскопические процедуры не могут быть экономически эффективными.
Основной набор мер и инструментов:
Основные хирургического робота система состоит из трех частей: пациент-робот стороны, видение колесницу, а роботы Master консоли. Робот хирург работает с удаленной консоли с помощью мастера Сочетание ручного управления и педали. Один педаль движения камеры (вправо / влево, вверх / вниз, вход / выход) и горизонтальную ориентацию, а рядом педаль управления в центре внимания. Другие педаль обеспечивает хватаясь механизмом, который позволяет перепозиционирования ручного управления и предоставляет документы диапазон движения за пределы физической консоли. Другой набор педалей управления как монополярный и биполярный источников энергии. Пациент стороне корзина колесные между ног пациента, и робот оружия крепятся к нержавеющей стали робота троакары через процесс, который называют "стыковки". Ручного управления, либо работать с камерой или до двух инструментов робота в одно время. Есть до трех оперативных робота оружие, с возможностью подкачки контроля между любыми двумя из трех оперативных оружия. Во время работы робота оперативно инструменты, хирург способный манипулировать, перемещать, захватив, втягивания, резка, рассекать, коагулирующие, и наложения швов. Робота Master консоли также предоставляет хирургу трехмерное изображение с помощью стереоскопического просмотра. Следующие инструменты используются для большинства гинекологических операций:

робота DaVinci и EndoWrist ® инструменты, обычно используемые для гинекологических кабинетов.
В отличие от промышленных роботов, эти системы не являются автономными, и быть таксономически правильно, они не должны быть названо машины. Хирургический робот фактически коллекции wristed инструменты называются манипуляторами, которые получают цифровые поручению сопряжение компьютера. Хирург, сидя на эргономичной консоли видео с "погружения" 3-D отображение, посвященных цифровой инструкций по управлению сложными ручками - по сути, джойстики с семью степенями свободы (добавив поле, рыскания и клещи как движение к тем, которые уже были доступны). Манипуляторов внутри тела пациента дубликат руки хирурга движений в консоли, и программное обеспечение отфильтровывает даже физиологический тремор стороны (3). Несмотря на все эти технологические достижения, которые делают почти автономных хирург, прикроватная помощник по-прежнему требуется для всех роботов с помощью случаях. Их ответственность является основным инструментом обмена, всасывания и орошения, шовный введение и извлечение, а также дополнительных послаблений.
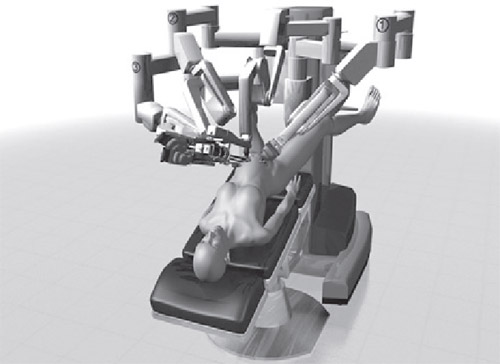
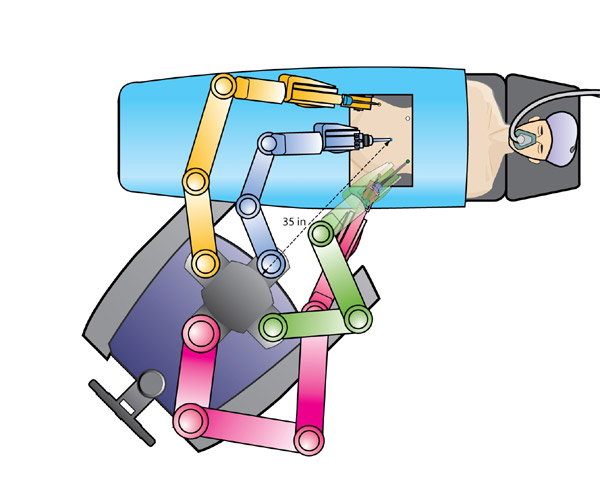
Пациент postioning; создание и стыковки робот для робота-гинекологической помощи операции.
Док робота и инструментом выбора:
Две системы, основными компонентами являются хирурга консоли и роботы колонку. После интубация трахеи, положение пациента в положение на спине литотомия обеими руками заправленные комфортно. 12-мм пупочный троакар находится используя открытый техника Хасон. Два 8-мм специально разработан робот троакары размещены на двустороннем 10 см сбоку и на уровне пупка. Между тем, аксессуары 10-мм троакар располагается между пупочной порта и левого бокового порта 3 см cephalad до пупка. Когда используется четвертая рука робота, который находится троакар 10 см боковых и 10 см в хвостовой права робот троакара. Таблица операционную снижена до самого низкого уровня и достаточно Тренделенбурга получено разрешение на удаление из кишечника таза, до 30 є у больных ожирением. Робота колонки передовых и помещается между ног пациента. Затем робот лапароскоп (InSite Vision System; Intuitive Surgical) прилагается к пупочной троакар, и два робота оружия крепятся к боковым роботом троакары. Хирург сидит, unscrubbed, в консоли. Помощник сидит на левой стороне пациента, используя правую руку, чтобы помочь хирургу через дополнительный порт (например, желудочные, введение швов и всасывания ирригация, судно герметизации, и образец поиска) и наоборот для левого помощником. С S и Si платформы стороны стыковки делает вагинальным доступом легче.
S и Si Платформа создана на стороне стыковочного
Разнообразие инструментов EndoWrist ® доступны для робототехнических gencologic хирургии, однако, хирург должен ограничить intrument обмен на эффективную процедуру и свести к минимуму затраты. Для большинства пациентов монополярная шпателем или ножницы используются с роботом-манипулятором права, П. К. (плазменные кинетической) на левой руке робота. Хапуга (Prograsp) инструмент вставлен с роботом четвертая рука, когда она используется. Когда требуется наложение швов, автоматический инструмент права перешли к мега держателем иглы, которая также способна резки швов.
Преимущества робототехнических хирургии:
Robotic Surgery предлагает три преимущества перед лапароскопии: Трехмерная система видения, wristed приборов, а эргономичная позиционирования для хирурга при выполнении хирургических процедур. Обычные лапароскопическая хирургия крутой кривой обучения для врачей, поскольку она имеет два-мерных изображений и включает в себя освоение нелогичным движений руки. Robotic Surgery, однако, решает некоторые из этих проблем, поскольку она использует трехмерных изображений и документов, что двигаться так же, как руки хирурга. Робота нормальная система устраняет тремор рук и позволяет хирургу, чтобы сидеть, а не стоять во время процедуры, которая помогает защититься от усталости. Лапароскопических гинекологических хирург выполняет процедуры в замкнутом пространстве, женский таз. Wristed приборов позволяет хирургу гинекологических получить точный угол инструментом, имеющимся в лапаротомии. Это также исключает опоры эффекта, который присутствует при лапароскопии, где хирурги необходимо переместить свои руки в противоположном направлении предполагаемого расположения дистального отзыв документа (например, по направлению к пациенту осталось, если они хотят, чтобы инструмент переехали на право пациента) . С робототехнических хирургии, движение являются естественными, и хирург перемещает свои руки в каком бы направлении они хотят двигаться документов. "Wristed" Приборостроение дает большую ловкость и предусматривает семь степеней свободы, похожие на человеческие руки (4). Три степени обеспечивается робота оружия придает троакары брюшной стенки (вставка, смолу, рыскания), и на четыре градуса в результате "wristed" инструментов (высота, рыскания, крена и сцепление). Условия шагом, крена и рыскания являются три характеристики, которые описывают вращений в трехмерном пространстве вокруг робота прибора системы координат, в центре масс. Пек вращение вокруг боковой оси. Рыскания является вращение вокруг вертикальной оси, а рулон вращение вокруг продольной оси.
Снижение кровопотери сообщалось в сравнительных исследованиях (5). Расширенной визуализации дает гинекологических хирург улучшилась способность идентифицировать самолеты тканей, кровеносных сосудов и нервов при выполнении хирургических процедур. Усталость и физический дискомфорт может стать ограничений во время любой хирургической процедуры. С робототехнических хирургии, хирург удобно размещается на хирургические консоли с точки Постоянной на голову пациента и манипулирует ручного управления и педали, а в эргономичное положение. Это может служить для снижения усталости и дискомфорта во время сложных хирургических операций. TilePro (Intuitive Surgical, Inc Sunnyvale, CA) является функцией, которая позволяет изображение и видео входа в консоль. Это может быть просмотрен в консоли хирурга для учебных целей на начальном этапе процесса обучения или для ввода радиологический данным УЗИ, компьютерной томографии (КТ) или магнитно-резонансной томографии (МРТ).
Недостатки робототехнических хирургии:
DaVinci робот стоит $ 1,65 миллиона на покупку с ежегодными затратами на поддержание данной технологии составляет $ 149000 в год. Малоинвазивные гистерэктомии подходы (вагинальные и лапароскопической) являются недостаточно используются в Соединенных Штатах. Например, из матки, сделали для топ-семь нераковых диагнозов ВИЧ в Соединенных Штатах, примерно 66,1% были брюшных, 21,8% были выполнены вагинально, и только 11,8% были выполнены лапароскопически (4) (6). Будет ли робот хирургия значительно улучшить результаты на вагинальный или обычных лапароскопических маршрутов? Введенные в начале 1990-х годах с помощью лапароскопической вагинальной гистерэктомии (LAVH), как ожидается, заменит "слепой" вагинальная гистерэктомия, однако в рандомизированном исследовании, единственное существенное различие между этими хирургических подходов была в два раза стоимость включить лапароскоп. Последующие исследования сделали показать преимущества LAVH относительной гистерэктомии сделано путем лапаротомии, однако эти цифры были стабильными при вагинальном гистерэктомии число сократилось, вероятно, за счет LAVH. Учитывая эти факты, многие исследователи полагают, что лапароскопические гистерэктомии как это в настоящее время практика способствовала никакого существенного улучшения ухода за пациентами, но приведет к увеличению расходов на здравоохранение (6) (7). Кроме того, увеличение доли рынка больнице испаряется как все больше больниц приобрести робота DaVinci - в некоторых случаях, еще не выявлении хирургической команды, которая имеет намерение использовать его.
Основными недостатками робототехнических хирургии в различных приложениях, входят стоимость, большие размеры робота консоль, ограниченная доступность в течение нескольких систем здравоохранения, отсутствие тактильной обратной связи или тактильные, и потребность в обучении жителей, посещающих хирургов и операционную персонала по использованию этой технологии. Дополнительные расходы, которые должны быть рассмотрены следующие сроки и стоимость подготовки врачей и обслуживающего персонала комнату, потенциальных расходов или снижение производительности во время обучения хирурга, и увеличение оперативных время, связанное с операционной комнате установка, а также сборка и разборка робототехнической системы на начальном этапе их принятия. Существует доказательство того, что с опытом работы, оперативное время может стать короче с лапароскопии (5). Док время было показано, уменьшаться. После стыковки, автоматические оружия прилагаются и крепится к специализированным троакары. Поскольку таблица операционных и робот не общаюсь, и поэтому не синхронизированы, после стыковки робот единицы, пациент кровати не может перемещаться в любом направлении, в том числе Тренделенбурга, в противном случае троакар глубина может стать неправильной позиции и брюшной стенки, а также как висцеральный травма может произойти.
Вагинальные манжеты зияние с малым потрошения кишечника после гистерэктомии является редким событием, которое может иметь место более часто с появлением автоматических лапароскопической гистерэктомии. Только 59 случаях было сообщено в период с января 1900 по декабрь 2001 года. 95% случаев произошли осуществляется после полной брюшную (TAH) матки или влагалища (TVH). Недавние обзоры описания непропорционально большое число вагинальных манжеты dehiscences происходящие после тотальной лапароскопической гистерэктомии (верхнего уровня), предполагая, что вагинальный манжеты зияние может быть более частым осложнением лапароскопической гистерэктомии чем TAH или TVH. Ретроспективный обзор 2399 гистерэктомии выполняется в клинике Майо в Scottsdale, штат Аризона, из которых 15% были выполнены робототехники и 9% с традиционной лапароскопии сообщает вагинально манжеты зияние ставке, которая будет 2,87% для робота матки и 0,47%, 0,13% и 0,99 % для верхнего уровня, TVH и TAH соответственно. Кольпотомия метод может объяснить наблюдаемые повышенный риск вагинальных манжеты зияние связанных с роботом хирургии. Это наблюдение может быть из-за теплового распространения и манжеты повреждение тканей от электро-хирургия используется для кольпотомия (8). Монополярная крючком и смесь коагуляции и режимов резания, теоретически, может уменьшить риск вагинальных манжеты зияние. Кроме того, гармонический скальпель, которая использует высокочастотные вибрирующих лезвий для резки могут быть использованы в ходе обоих робота и традиционного верхнего уровня.
Применение роботов-хирургов в содействии Генерального Гинекологическая:
Робототехника была рассматриваться в качестве возможного способа облегчить тенденция к менее инвазивные матки и результатов лечения пациентов. Наличие робота система не должна диктовать маршрут гистерэктомии (эндоскопическое против вагинальный). Когда это технически осуществимо и с медицинской точки зрения, пациентам, нуждающимся в матки должна быть предложена вагинальный подход, поскольку заболеваемость, как представляется, ниже, с вагинальным подход, чем с любым другим методом. Эндоскопическая гистерэктомия, указаны в следующих случаях: лизис спаек, лечение эндометриоза, управление leiomyomata матки и / или придатков массы, что усложняет выполнение вагинальной гистерэктомии; перевязки infundibulopelvic связок для облегчения трудных удалению яичников, а также оценку таза и брюшную полость до матки. В 2002 году это исследование (9) сообщила об одном из самых ранних опытом с роботом с помощью лапароскопической гистерэктомии. Эта серия включает 16 больных в возрасте от 27 до 77 лет. Оперативное время варьировались от 270 до 600 минут, а потеря крови колеблется от 50 мл и 1500 мл, при средней потере 300 мл. Средняя продолжительность пребывания составляет 2 дней, при диапазоне от 1 до 3 дней. Хотя их подход был назван лапароскопическая гистерэктомия, во всех случаях в этой серии типа IIB по данным Американской ассоциации гинекологических Laparoscopists (AAGL) система классификации лапароскопическая гистерэктомия, это означает, что были проведены задним кульдотомия и перевязки кардинала и маточно-крестцовый комплексы связка вагинально до полного матки (9).
Сравнительное исследование (5) на сегодняшний день роботом гистерэктомия с обычными лапароскопии является ретроспективный обзор 200 последовательных случаев гистерэктомии завершены до и после осуществления программы робототехники. Были никаких статистически степени в характеристик пациента или веса матки между этими двумя группами. Темпы перехода к интраоперационной лапаротомия два раза выше в лапароскопической когорты 100 больных, по сравнению с роботом когорты (9% по сравнению с 4%). Средняя потеря крови был также значительно сокращен в робота когорты. Однако частота неблагоприятных событий была одинаковой в двух группах. Mayo Clinic, Scottsdale, опубликовал серию крупнейшего на сегодняшний день (11); девяносто один пациентов, перенесших робот матки были оценены. Были исключены, кто просит лимфаденэктомия. Был рассмотрен широкий круг патологии, в том числе новообразования яичников, маточных кровотечений ненормальным, и умеренной до тяжелой эндометриоз,. Средний вес матки 135,5 граммов. Среднее оперативное время было 127,8 минут, по оценкам, потери крови только 78,6 мл и пребывания в стационаре на 1,4 суток. Были никакого преобразования обычного лапароскопии или лапаротомии не мочевой пузырь или мочеточник пострадал.
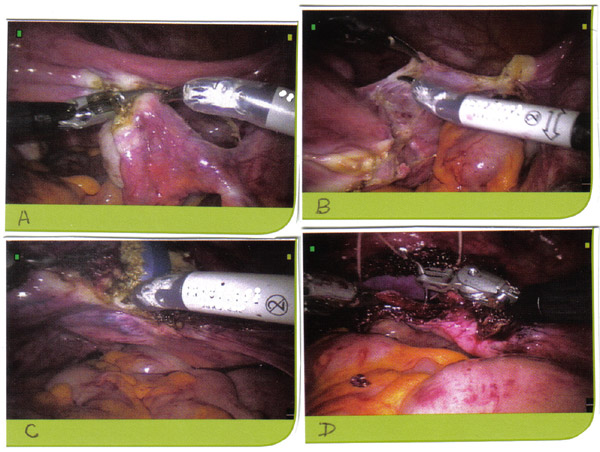
Робот-помощь гистерэктомии по поводу доброкачественных условиях; А. скелетируя и коагулирующий сосудистых цветоносах B. пузырно-маточные отражения; C. кольпотомия, Д. Вагинальные манжеты закрытия.
Применение роботов с помощью хирургии в гинекологической онкологии:
Естественное развитие технологии роботов в гинекологии была в области онкологии. Ранний опыт наглядно продемонстрировали возможности применения робота помощи лапароскопической стадий рака без увеличения осложнений или компромисс в хирургической техники. Были никаких статистически значимых различий между этими тремя подходами: лапаротомия, обычных лапароскопических и роботом, в отношении среднего возраста, индекса массы тела, или количество лимфатических узлов (13). Тем не менее, авторы нашли значительно меньше оценкам, к потере крови и сокращение сроков пребывания связанных с роботом подход. В этом исследовании, оперативное время были сравнимы с открытой хирургии и лучше, чем обычные лапароскопии. Были также никакого преобразования или интраоперационных осложнений в роботе группы (12). Аналогичным Boggess др. опубликовала исследование по сопоставлению робот с помощью обычных лапароскопических и открытых гистерэктомия с постановкой на рак эндометрия (14). Они обнаружили, что высокая урожайность лимфатических узлов с роботом подход. Robotic гистерэктомия с постановкой был связан со значительно больше оперативное время, в этой серии, по сравнению с открытыми матки, но короче, оперативно раза по сравнению с лапароскопической группе. В конечном счете, 5-летняя выживаемость будет необходимо оценить по-настоящему оценить влияние робототехники на гинекологическом стадий рака. Robotic Surgery является минимально-инвазивных полезным инструментом для всеобъемлющего хирургического постановка ожирением и болезненно женщин с ожирением и раком эндометрия (12) (14). Как этого пациента население повышенному риску смерти от всех причин, в том числе послеоперационных осложнений, все усилия должны быть направлены на улучшение их результаты и минимально инвазивной хирургии предоставляет полезную платформу с помощью которых это может произойти.
Применение роботов с помощью хирургии в репродуктивной эндокринологии:
Robotic технология облегчает также вскрытие и ушивание миома матки разреза. В ретроспективном случае соответствии исследование по сопоставлению робота миомэктомия открыть миомэктомия, исследователи сообщили, что больше оперативной раза в роботе группы [в виду: 231 (+ / -85) минут против 154 (+ / - 43 минут, p <.05], но сократилась кровопотеря [средняя: 195 (+ / - 228) мл против средних 364 (+ / - 473 мл, p <.05] и сокращение сроков пребывания [в виду: 1,4 (+ / -0,9 суток против 3,62 ( + / - 1,5 дней, р <.05] по сравнению с лапаротомии группа (15). Поскольку различные этапы миомэктомия может быть затруднительным при обычной лапароскопии, существует много проблем. В частности, возможность выяснять лейомиомы и выполнять многослойный закрытие требует передовых лапароскопических навыков. Хотя беременности после миомэктомии управляемый эндоскопические аналогичны тем, которые после лапаротомии, основные беспокоиться по-прежнему остается риск разрыва матки. Кроме того, риск рецидива, как представляется, выше после лапароскопической миомэктомии сравнению с лапаротомии. Эти факторы и связанных с ними обучение может способствовать тот факт, что брюшная миомэктомия остается стандартный подход (16).
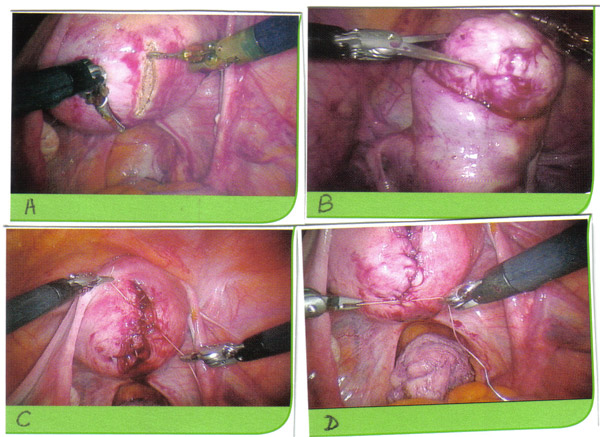
Робот-помощь миомэктомия; А. гистеротомия, Б. Энуклеация; C. Многослойное шов закрытия дефекта - глубокие слои, Д. многослойного шва закрытия дефекта - поверхностный слой.
Возможность воспользоваться преимуществами усовершенствованной системы видения наряду с микрохирургической точности формулирования эндоскопических инструментов иллюстрируется в гинекологической хирургии с трубно reanastomosis. В 2007 году Dharia и др. (4) перспективы по сравнению роботом с помощью трубного анастомоза, чтобы открыть микрохирургических трубного анастомоза у женщин с историей двусторонней перевязке маточных труб, которые желаемого разворота. Они обнаружили, робот трубный анастомоз был связан со значительно больше оперативного времени (201 минут по сравнению с 155 минутами с открытым), но значительно короче больницу срок (4 часа по сравнению с 34,7 часа с открытым), и быстро вернуться к нормальной повседневной жизни (11,1 дней по сравнению с 28,1 дней с открытым). Беременности была сопоставима между группами (62,5% по сравнению с 50% с открытым), но робот Группа большего числа внематочной беременности (4 к 1 по сравнению с открытым). Стоимость доставки была аналогичной между роботом анастомоза ($ 92488) и открытое трубного анастомоза ($ 92206).
Применение роботов с помощью хирургии в урогинекологии / таза Реконструкция:
Sacrocolpopexy, вероятно, наиболее быстро растущих восстановительная процедура, осуществляемая робототехники. Процедура включает в себя обширный рассечения presacral ректовагинальной пространства и перегородки, сетка позиционирования, наложение швов, и экстра-телесным наложения швов и узлов привязки, которая упрощается система робота. Существуют четыре основные исследования по sacrocolpopexy робота. Главное преимущество этого ретроспективном исследовании когорты (17) является тот факт, что авторы доклада о результатах роботы sacrocolpopexy в сравнении с контрольной группой пациентов, которые подверглись брюшную sacrocolpopexy, стандартный критерий для продвинутых выпадение влагалища сводом. Крайне важно, чтобы включить в контрольной группе для сравнения для оценки эффективности этих новых минимально-инвазивной хирургической техники. Стоит отметить, что в контрольной группе в этом исследовании пациенты составили в том же учреждении, подвергаются той же модели практики в отношении Анестезиология, включая аналогичные хирургической техникой, антибиотикопрофилактики и послеоперационном руководящие принципы разряда как роботы группы. Другая сила данного исследования является применение объективных данных, в виде POP-Q оценки, для оценки результатов. Это сводит к минимуму предвзятость, которые могут быть введены ретроспективного дизайна исследования. Robotic sacrocolpopexy показал аналогичный краткосрочный вагинальный поддержки свода по сравнению с брюшным sacrocolpopexy, с меньшей потерей крови и сокращение сроков пребывания. Оперативное время было больше времени, но может уменьшаться по мере обучения для этой новой процедуры улучшается. Были аналогичные результаты между двумя группами с точки зрения интраоперационных осложнений, но это ограничено низкой распространенности этих осложнений. Долгосрочные данные необходимы для оценки надежности этой новых минимально-инвазивных подход к выпадению ремонта. Robotic везиковагинальных и мочеточниково-влагалищный свищ ремонта сообщалось через небольшие серии случаев и тематических докладов. В случае, серия из семи пациентов с пузырно-влагалищных свищей, исследователи сообщили среднем оперативное время 141 минут (диапазон от 110 до 160). Средняя потеря крови составляет 90 мл, и никаких существенных интраоперационных или послеоперационных осложнений наблюдались (18).
Обучение и крупными компаниями:
Убежденность в том, что робот хирургии позволит обеспечить более быстрое развитие необходимых навыков и позволить большему числу хирургов, для достижения этих навыков, и, следовательно, обеспечить минимально инвазивных хирургических ссылок на большее число пациентов. Существует нехватка опытных хирургов робота. В настоящее время подготовка включает в себя практику хирургических роботов либо свинья или человек свежей тканью окружающей среды, чтобы ознакомиться с функциями робота, крепления оружия робот робот троакары, а также общих функций робота консоли. Дальнейшее обучение позволяет хирургу, чтобы научиться выполнять простые маневров как жадных, резка, и intracorporeal узел наручников, последний задачей было особенно трудно с обычной лапароскопии. Два исследования, особо смотрели на кривую обучения. Недавнее исследование (19) оценки 113 последовательных пациентов старше 22-месячного периода. Они обнаружили, что кривая обучения для различных хирургических вмешательств доброкачественный стабилизировались в связи с оперативным разы время после 50 случаев. Аналогичная кривая обучения было задокументировано для команды операционную чтобы иметь возможность создать робота для хирургии в 30 минут. Этот перерыв точке было 20 случаев. Главным препятствием часто встречаются в начале робота опыта хирурга это "время стыковки", или крепления роботизированного устройства для пациента.
С введением робототехнических хирургии, больниц и ведомствам были поставлены под сомнение, чтобы установить Credentialing требования к этой передовой хирургической техники. Есть не Credentialing общепризнанных принципов. Большинство медицинских учреждений потребует выполнения как минимум два робота хирургических процедурах каждого типа, для которых привилегии испрашивается в присутствии эксперта наставника. Некоторые учебные заведения используют четыре, как минимальное количество proctored робота операций необходимы для независимого робота привилегии. Эксперт наставника определяется как хирург, который имеет текущий робототехнических хирургических привилегиях и был утвержден в качестве эксперта наставник председателя Департамента подателем ходатайства о привилегии. Как и в других хирургических процедур технического обслуживания компетенции требуется проведение процедур на постоянной основе.
Будущее роботов хирургия:
В этой высокотехнологичной будущем, хирургия может быть выполнена умело и быстро, даже в опасных или inaccible мест. В дополнение к малым или узкие места в человеческом теле, удаленных мест в мире, часто упоминаются те ссылаясь на обещание автоматических операций. Логическим продолжением этого режима работы - Телехирургия может быть хорошим средством для распространения здравоохранения в развивающихся странах. И НАСА изучает ее возможности для предлагаемого пилотируемый полет на Луну и Марс. Многие из недостатков может быть повышена путем дальнейшего развития и технологической доработки. Будущие исследования необходимо решить вопросы экономической эффективности, влияние на подготовку резиденты, и является ли эта технология является лучшей сделал доступным для всех хирургов или ограниченное число хирургов с высоким объемом хирургического которые разрабатывают робота частности опыт и способны поддерживать знания с этой быстро развивающейся технологии.
Telestration, умение писать на сенсорном экране и иметь маркировку, видимых в консоли, это полезно, но не заменяет руководства по вопросам образования "совместного sugeon" обучения робота консоль бы себе позволить. Такой "пилот" Консоль В настоящее время доступны commercialy с платформой Si. Даже в нынешних системах начинают положить на практике, истинные провидцы сосредоточены на хирургический робот не как механическое устройство, нежели в качестве информационной системы - одна, которая должна быть слита с другими информационными системами. Один предлагается пример такого рода синтеза изображений является наведение хирургии, также называемый хирургический навигации. Роботы-хирурги помощь смогут видеть в реальном времени, трехмерных изображений сканер электронной накладываются на операционное поле, которое отображается на мониторе (20). Иными словами, на экране, анатомии человека будет оказана полупрозрачными, и врач сможет определить точное местоположение опухоли и более легко избежать повреждения жизненно важных структур - таких, как основные intraparenchymal сосуды и желчные протоки, которые иногда случайное разорваны или нижней полой Vana ходе лимфатических узлов во время вскрытия гинекологической онкологии случаях или во время адреналэктомия права. В самом деле, с предоперационной изображения сканера, хирурги могли робототехники практику хирургии своих пациентов, накануне ночью, и компьютер робот может быть запрограммирован не допустить, чтобы его инструменты проникнуть в полую вену, устранив тем самым кровавый интраоперационной неудач.
Резюме:
Robotic Surgery видел огромный рост на протяжении последних десяти лет. Потому что робот технология позволяет хирургам, чтобы легко и просто выполнять сложные лапароскопические маневров, он уже revolutionalized лапароскопические урологические и онкологические операции. Несколько исследований, проведенных связывают робототехники обеспечивают повышение производительности, улучшение точности, быстрее наложения швов, и меньшим числом ошибок по сравнению с обычными лапароскопической intrumentation. Преимущества включают: ловкости, точности, трехмерной визуализации и усталость сокращена хирурги's. Свои недостатки: отсутствие тактильной обратной связи, увеличением расходов, громоздкая система. Хорошо спланированных рандомизированных испытаний, сравнивающих маршрутов хирургии с клинически значимых долгосрочных Необходимы долгосрочные результаты. Эти результаты включают в себя воздействие на качество жизни пациентов и satifaction связанных с матки, рецидив, и уровень выживаемости для онкологии процедуры, будущие темпы рождаемости и исходов беременности связано с трубно reanastomosis или миомэктомия, и повторная операция цены на недержание мочи или рецидивирующими пролапс тазовых органов.
Благодарность:
Благодарность выражается Доктор Джеймс Л. Whiteside, кафедра акушерства и гинекологии, Дартмутской медицинской школы и Дартмут-Хичкок медицинский центр, Ливан, Нью-Гэмпшир (США) для экспертных заключений и рассмотрения документа. Особая благодарность Кендра Martell и Джонатан Конта, Intuitive Surgical вкл., Sunnyvale, CA для оказания помощи в исследованиях и поддержку.
Список литературы:
- Stylopoulos N, Rattner D. Robotics and ergonomics. Surg Clin North Am 2003;83:1321-1337
- Satava RM. Robotic surgery: from past to future -- a personal journey. Surg Clin North Am 2003;83:1491-1500,xii
- Camarillo DB, Krummel TM, Salisbury JK Jr. Robotic surgery: past, present, and future. Am J Surg 2004;188:Suppl:2S-15S
- Visco AG, Advincula AP. Robotic gynecologic surgery. Obstet Gynecol 2008;112:1369-1384
- Payne TN, Dauterive FR. A comparison of total laparoscopic hysterectomy to robotically assisted hysterectomy: surgical outcomes in a community practice. J Minim Invasive Gynecol 2008;15:286-291
- Wu JM, Wechter ME, Geller EJ et al. Hysterectomy rates in the United States, 2003 Obstet Gynecol 2007;110:1091-1095
- Meeks GR. Advanced laparoscopic gynecologic surgery. Surg Clin North Am 2000;80:1443-1464
- Robinson BL, Liao JB, Adams SF et al. Vaginal cuff dehiscence after robotic total laparoscopic hysterectomy. Obstet Gynecol 2009;114:369-371
- Diaz-Arrastia C, Jurnalov C, Gomez G et al. Laparoscopic hysterectomy using a computer-enhanced surgical robot. Surg Endosc 2002;16:1271-1273
- Olive DL, Parker WH, Cooper JM et al. The AAGL classification system for laparoscopic hysterectomy. Classification committee of the American Association of Gynecologic Laparoscopists (AAGL). J Am Assoc Gynecol Laparosc 2007;7:9-15
- Kho RM, Hilger WS, Hentz JG et al. Robotic hysterectomy: technique and initial outcomes. Am J Obstet Gynecol 2007;197:113.e1-4
- Veljovich DS, Paley PJ, Drescher CW et al. Robotic surgery in gynecologic oncology: program initiation and outcomes after the first year with comparison with laparotomy for endometrial cancer staging. Am J Obstet Gynecol 2008;198:679.e1-9
- Magrina JF, Kho RM, Weaver AL et al. Robotic radical hysterectomy: comparison with laparoscopy and laparotomy. Gynecol Oncol 2008;109:86-91
- Boggess JF. Robotic-Assisted Hysterectomy for Endometrial Cancer. National Library of Medicine Archives. http://www.nlm.nih.gov/medlineplus/surgeryvideos.html Accessed September 22, 2009
- Advincula AP, Xu x, Goudeau S et al. Robotic-assisted laparoscopic myomectomy versus abdominal myomectomy: a comparison of short-term surgical outcomes and immediate costs. J Minim Invasive Gynecol 2007;14:698-705
- Advincula AP, Song A. The role of robotic surgery in gynecology. Curr Opin Obstet Gynecol 2007;19:331-336
- Geller EJ, Siddiqui NY, Wu JM et al. Short-term outcomes of robotic sacrocolpopexy compared with abdominal Sacrocolpopexy. Obstet Gynecol 2008;112:1201-1206
- Hemal AK, Kolla SB, Wadhwa P. Robotic reconstruction for recurrent supratrigonal vesicovaginal fistulas. J Urol 2008;180:981-985
- Leihan JP Jr, Kovanda C, Seshadri-Kreaden U. What is the learning curve for robotic assisted gynecologic surgery? J Minim Invasive Gynecol 2008;15:589-594
- Ota T, Degani A, Schwartzman D et al. A highly articulated robotic surgical system for minimally invasive surgery. Am Thorac Surg 2009;87:1253-1256
Опубликован: 23 November 2009
Dedicated to Women's and Children's Well-being and Health Care Worldwide
www.womenshealthsection.com